Radar Ultrassônico
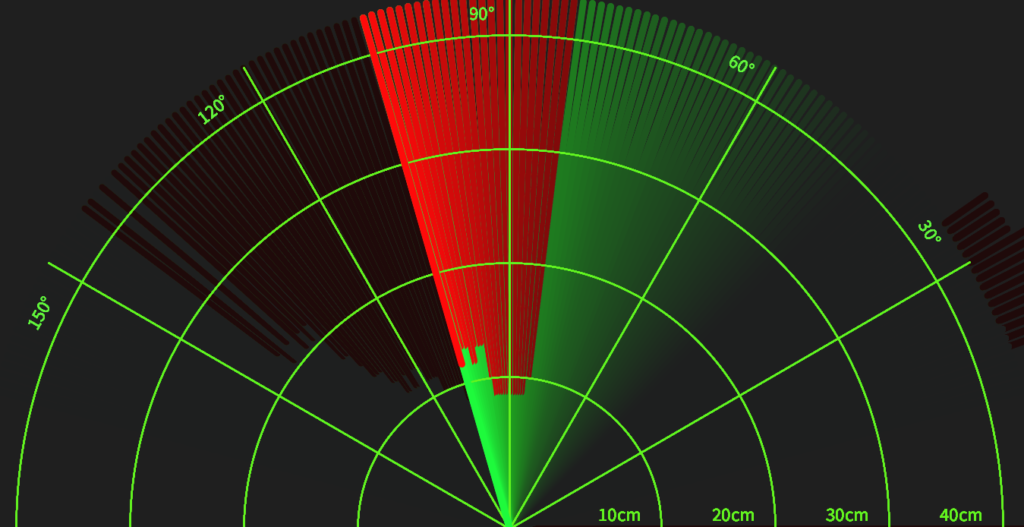
Neste projeto você vai aprender a construir um radar ultrassônico utilizando a placa de desenvolvimento Arduino e o software Processing.
Para o projeto, iremos utilizar um sensor ultrassônico fixo em um servo motor. Eles serão responsáveis por realizar uma varredura do ambiente em busca de obstáculos. Os dois componentes serão conectados ao Arduino, o qual coordena o movimento do servo, realiza a leitura do sensor e envia o resultado para o Processing.
Lista de materiais:
- Arduino
- Servo motor
- Sensor Ultrassônico HC-SR04
- Fios
Pinagem:
- Trigger -> Pino 6.
- Echo -> Pino 7.
- Servo -> Pino 8.
Código do Radar Ultrassônico na IDE Arduino
#include <Servo.h>
const int trigPin = 6;
const int echoPin = 7;
long tempo;
int distancia;
Servo servo;
void setup() {
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
Serial.begin(9600);
servo.attach(8);
}
void loop() {
for(int i=15;i<=165;i++){
servo.write(i);
delay(30);
distancia = calculoDistancia();
Serial.print(i);
Serial.print(“,”);
Serial.print(distancia);
Serial.print(“.”);
}
for(int i=165;i>15;i–){
servo.write(i);
delay(30);
distancia = calculoDistancia();
Serial.print(i);
Serial.print(“,”);
Serial.print(distancia);
Serial.print(“.”);
}
}
int calculoDistancia(){
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
tempo = pulseIn(echoPin, HIGH);
distancia= tempo*0.034/2;
return distancia;
}
Código do Radar Ultrassônico no Processing
import processing.serial.*;
import java.awt.event.KeyEvent;
import java.io.IOException;
Serial myPort;
String angle=””;
String distance=””;
String data=””;
String noObject;
float pixsDistance;
int iAngle, iDistance;
int index1=0;
int index2=0;
PFont orcFont;
void setup() {
size (1366, 700);
smooth();
myPort = new Serial(this, “COM4”, 9600);
myPort.bufferUntil(‘.’);
}
void draw() {
fill(98, 245, 31);
noStroke();
fill(0, 4);
rect(0, 0, width, 1010);
fill(98, 245, 31); // yeþil renk
drawRadar();
drawLine();
drawObject();
drawText();
}
void serialEvent (Serial myPort) {
data = myPort.readStringUntil(‘.’);
data = data.substring(0, data.length()-1);
index1 = data.indexOf(“,”);
angle= data.substring(0, index1);
distance= data.substring(index1+1, data.length());
iAngle = int(angle);
iDistance = int(distance);
}
void drawRadar() {
pushMatrix();
translate(683, 700);
noFill();
strokeWeight(2);
stroke(98, 245, 31);
// draws the arc lines
arc(0, 0, 1300, 1300, PI, TWO_PI);
arc(0, 0, 1000, 1000, PI, TWO_PI);
arc(0, 0, 700, 700, PI, TWO_PI);
arc(0, 0, 400, 400, PI, TWO_PI);
// draws the angle lines
line(-700, 0, 700, 0);
line(0, 0, -700*cos(radians(30)), -700*sin(radians(30)));
line(0, 0, -700*cos(radians(60)), -700*sin(radians(60)));
line(0, 0, -700*cos(radians(90)), -700*sin(radians(90)));
line(0, 0, -700*cos(radians(120)), -700*sin(radians(120)));
line(0, 0, -700*cos(radians(150)), -700*sin(radians(150)));
line(-700*cos(radians(30)), 0, 700, 0);
popMatrix();
}
void drawObject() {
pushMatrix();
translate(683, 700);
strokeWeight(9);
stroke(255, 10, 10); // kýrmýzý renk
pixsDistance = iDistance*22.5;
// 40 cm ye kadar ölçer
if (iDistance<40) {
line(pixsDistance*cos(radians(iAngle)), -pixsDistance*sin(radians(iAngle)), 700*cos(radians(iAngle)), -700*sin(radians(iAngle)));
}
popMatrix();
}
void drawLine() {
pushMatrix();
strokeWeight(9);
stroke(30, 250, 60);
translate(683, 700);
line(0, 0, 700*cos(radians(iAngle)), -700*sin(radians(iAngle)));
popMatrix();
}
void drawText() {
pushMatrix();
if (iDistance>40) {
noObject = “Out of Range”;
} else {
noObject = “In Range”;
}
fill(0, 0, 0);
noStroke();
rect(0, 1010, width, 1080);
fill(98, 245, 31);
textSize(25);
text(“10cm”, 800, 690);
text(“20cm”, 950, 690);
text(“30cm”, 1100, 690);
text(“40cm”, 1250, 690);
textSize(40);
text(“Object: ” + noObject, 240, 1050);
text(“Angle: ” + iAngle +” °”, 1050, 1050);
text(“Distance: “, 1380, 1050);
if (iDistance<40) {
text(” ” + iDistance +” cm”, 1400, 1050);
}
textSize(25);
fill(98, 245, 60);
translate(390+960*cos(radians(30)), 780-960*sin(radians(30)));
rotate(-radians(-60));
text(“30°”, 0, 0);
resetMatrix();
translate(490+960*cos(radians(60)), 920-960*sin(radians(60)));
rotate(-radians(-30));
text(“60°”, 0, 0);
resetMatrix();
translate(630+960*cos(radians(90)), 990-960*sin(radians(90)));
rotate(radians(0));
text(“90°”, 0, 0);
resetMatrix();
translate(760+960*cos(radians(120)), 1000-960*sin(radians(120)));
rotate(radians(-38));
text(“120°”, 0, 0);
resetMatrix();
translate(840+900*cos(radians(150)), 920-960*sin(radians(150)));
rotate(radians(-60));
text(“150°”, 0, 0);
popMatrix();
}
import java.awt.event.KeyEvent;
import java.io.IOException;
Serial myPort;
String angle=””;
String distance=””;
String data=””;
String noObject;
float pixsDistance;
int iAngle, iDistance;
int index1=0;
int index2=0;
PFont orcFont;
void setup() {
size (1366, 700);
smooth();
myPort = new Serial(this, “COM4”, 9600);
myPort.bufferUntil(‘.’);
}
void draw() {
fill(98, 245, 31);
noStroke();
fill(0, 4);
rect(0, 0, width, 1010);
fill(98, 245, 31); // yeþil renk
drawRadar();
drawLine();
drawObject();
drawText();
}
void serialEvent (Serial myPort) {
data = myPort.readStringUntil(‘.’);
data = data.substring(0, data.length()-1);
index1 = data.indexOf(“,”);
angle= data.substring(0, index1);
distance= data.substring(index1+1, data.length());
iAngle = int(angle);
iDistance = int(distance);
}
void drawRadar() {
pushMatrix();
translate(683, 700);
noFill();
strokeWeight(2);
stroke(98, 245, 31);
// draws the arc lines
arc(0, 0, 1300, 1300, PI, TWO_PI);
arc(0, 0, 1000, 1000, PI, TWO_PI);
arc(0, 0, 700, 700, PI, TWO_PI);
arc(0, 0, 400, 400, PI, TWO_PI);
// draws the angle lines
line(-700, 0, 700, 0);
line(0, 0, -700*cos(radians(30)), -700*sin(radians(30)));
line(0, 0, -700*cos(radians(60)), -700*sin(radians(60)));
line(0, 0, -700*cos(radians(90)), -700*sin(radians(90)));
line(0, 0, -700*cos(radians(120)), -700*sin(radians(120)));
line(0, 0, -700*cos(radians(150)), -700*sin(radians(150)));
line(-700*cos(radians(30)), 0, 700, 0);
popMatrix();
}
void drawObject() {
pushMatrix();
translate(683, 700);
strokeWeight(9);
stroke(255, 10, 10); // kýrmýzý renk
pixsDistance = iDistance*22.5;
// 40 cm ye kadar ölçer
if (iDistance<40) {
line(pixsDistance*cos(radians(iAngle)), -pixsDistance*sin(radians(iAngle)), 700*cos(radians(iAngle)), -700*sin(radians(iAngle)));
}
popMatrix();
}
void drawLine() {
pushMatrix();
strokeWeight(9);
stroke(30, 250, 60);
translate(683, 700);
line(0, 0, 700*cos(radians(iAngle)), -700*sin(radians(iAngle)));
popMatrix();
}
void drawText() {
pushMatrix();
if (iDistance>40) {
noObject = “Out of Range”;
} else {
noObject = “In Range”;
}
fill(0, 0, 0);
noStroke();
rect(0, 1010, width, 1080);
fill(98, 245, 31);
textSize(25);
text(“10cm”, 800, 690);
text(“20cm”, 950, 690);
text(“30cm”, 1100, 690);
text(“40cm”, 1250, 690);
textSize(40);
text(“Object: ” + noObject, 240, 1050);
text(“Angle: ” + iAngle +” °”, 1050, 1050);
text(“Distance: “, 1380, 1050);
if (iDistance<40) {
text(” ” + iDistance +” cm”, 1400, 1050);
}
textSize(25);
fill(98, 245, 60);
translate(390+960*cos(radians(30)), 780-960*sin(radians(30)));
rotate(-radians(-60));
text(“30°”, 0, 0);
resetMatrix();
translate(490+960*cos(radians(60)), 920-960*sin(radians(60)));
rotate(-radians(-30));
text(“60°”, 0, 0);
resetMatrix();
translate(630+960*cos(radians(90)), 990-960*sin(radians(90)));
rotate(radians(0));
text(“90°”, 0, 0);
resetMatrix();
translate(760+960*cos(radians(120)), 1000-960*sin(radians(120)));
rotate(radians(-38));
text(“120°”, 0, 0);
resetMatrix();
translate(840+900*cos(radians(150)), 920-960*sin(radians(150)));
rotate(radians(-60));
text(“150°”, 0, 0);
popMatrix();
}
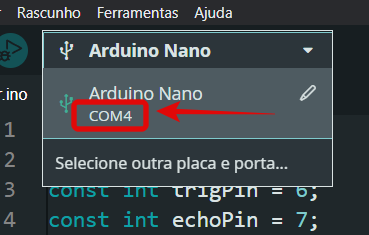
Na IDE do Processing, altere a linha abaixo para a porta “COM” que o Arduino está conectado.
Caso o Arduino esteja conectado a porta COM 4, por exemplo, o código deve ficar assim:
myPort = newSerial(this, "COM4", 9600);A imagem abaixo mostra como saber a porta COM que o Arduino está conectado.
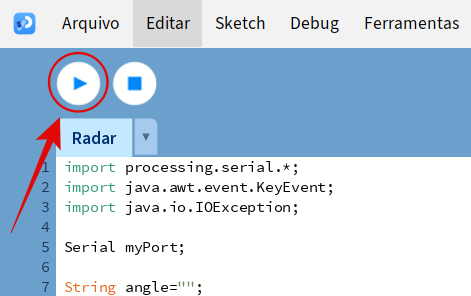
Na IDE do Processing clique no botão “PLAY” conforme a figura abaixo.