Braço Robótico
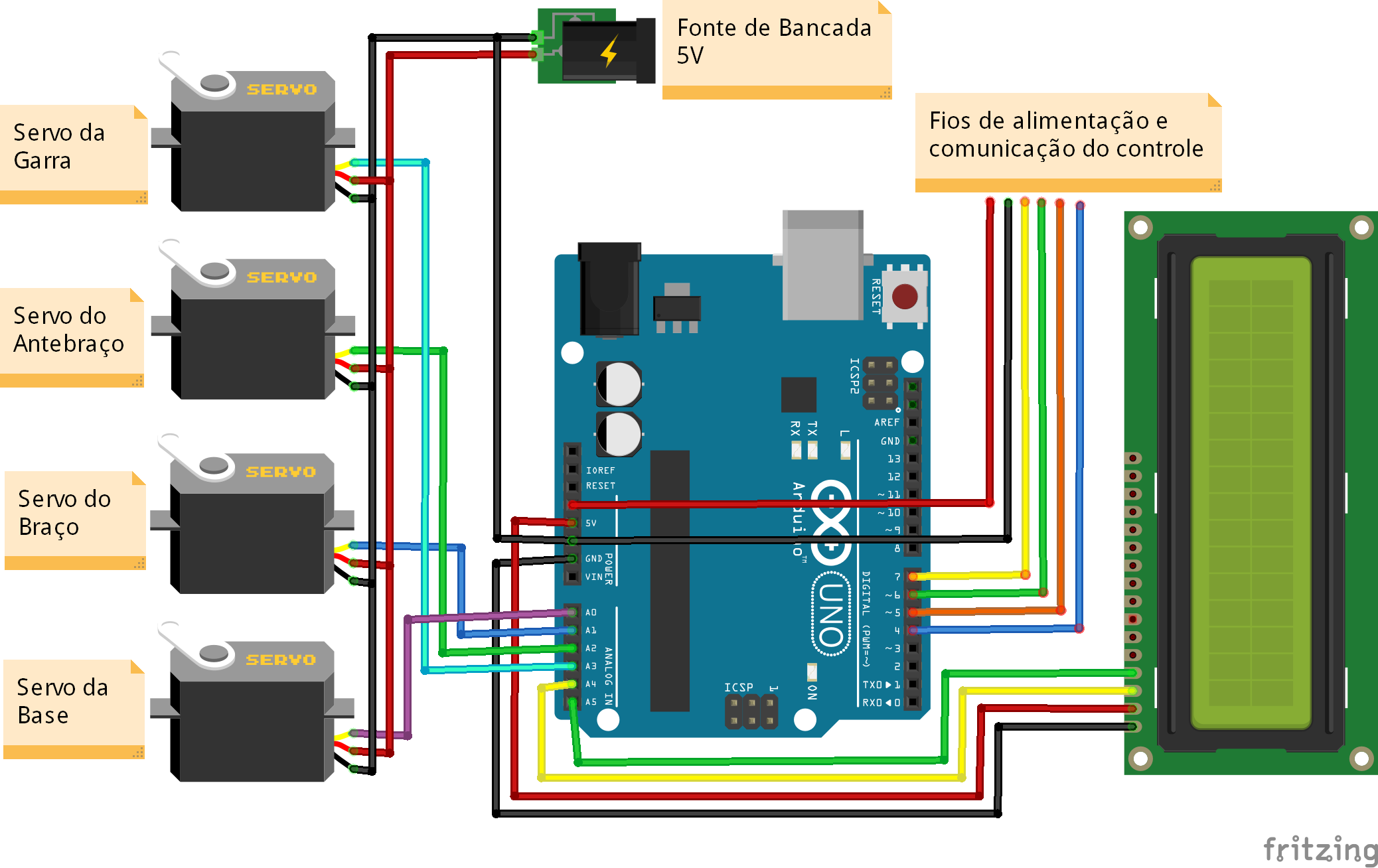
Pinagem:
- Servo da Base -> A0 .
- Servo do Braço -> A1.
- Servo do Antebraço -> A2.
- Servo da Garra -> A3.
- SDA do Display – > A4.
- SCL do Display -> A5.
- Comunicação do Controle -> 4, 5, 6, 7.
Ângulo dos Servos:
- Servo da Base -> Ângulo Padrão: 90º. Limites: de 0º a 180º.
- Servo do Braço -> Ângulo Padrão: 130º. Limites: de 0º a 180º.
- Servo do Antebraço -> Ângulo Padrão: 70º. Limites: de 0º a 180º.
- Servo da Garra -> Ângulo Padrão: 20º. Limites: de 0º a 40º.
Código Base
#include <PS2X_lib.h>
#include<Servo.h>
#define pin_servo1 A0 //Pino do Servo da base
#define pin_servo2 A1 //Pino do Servo do braço
#define pin_servo3 A2 //Pino do Servo do Antebraço
#define pin_servo4 A3 //Pino do Servo da garra
byte ang_servo1 = 90; //Ângulo padrão do Servo da base
byte ang_servo2 = 130; //Ângulo padrão do Servo do braço
byte ang_servo3 = 70; //Ângulo padrão do Servo do Antebraço
byte ang_servo4 = 20; //Ângulo padrão do Servo da garra
void setup() {
}
void loop() {
}